РУКОВОДСТВО ПО ЭКСПЛУАТАЦИ
Введение
KIPPRIBOR. Настоящее руководство по эксплуатации (далее по тексту руководство) предназна- чено для специалистов, осуществляющих монтаж, обслуживание и эксплуатацию драйверов ша- говых двигателей KIPPRIBOR (далее по тексту драйверов). Целью настоящего руководства является ознакомление пользователя с техническими ха- рактеристиками драйверов KIPPRIBOR, их модификациями, конструкцией, особенностями мон- тажа и эксплуатации, правилами подключения, а также мерами безопасности при выполнении работ. Перед началом эксплуатации драйвера внимательно ознакомьтесь с содержанием насто- ящего руководства и строго следуйте его рекомендациям. Это обеспечит безопасность персо- нала при работе с драйвером, позволит эксплуатировать драйвер с максимальной эффективно- стью весь срок его эксплуатации.
Особое внимание уделяйте пунктам, отмеченным знаками:
Опасность! Несоблюдение примечаний, обозначенных этим знаком может привести к серьёзным травмам обслуживающего персонала или повреждению сопутствую- щего оборудования.
Внимание! Несоблюдение примечаний, обозначенных этим знаком может привести к повреждению драйвера или иного сопутствующего оборудования.
Подсказка. Этим знаком отмечены полезные рекомендации, которые помогут Вам в работе с драйвероь, сделав её проще и понятнее.
1 Меры безопасности
Монтаж, подключение и эксплуатация драйверов должны выполняться только квали- фицированными специалистами, имеющими допуск к проведению электромонтажных работ. Драйверы являются изделиями общепромышленного назначения. Они не являются изделием медицинского назначения, не являются электрическим оборудованием лиф- тов и грузовых подъёмников, не являются оборудованием оборонного назначения. Драйверы не допускается эксплуатировать во взрывоопасной среде, а также на предприятиях / объектах ВПК и атомной отрасли. Не допускается изменять конструкцию и разбирать драйвер. Это может повлечь выход его из строя или стать причиной травмы. Допускается эксплуатировать драйвер только в при условии его надежного крепле- ния на основании или панели. Все работы по монтажу, подключению, обслуживанию драйверов следует выполнять со снятием напряжения во избежание повреждения драйвера и причинения вреда здо- ровью.
Несоблюдение пользователем правил и рекомендаций, изложенных в данном Руковод- стве может повлечь за собой сокращение срока службы драйвера, его выход из строя и лишение права на гарантийное обслуживание изделия! Драйверы следует эксплуатировать только при условии соответствия параметров питающего напряжения паспортным данным драйвера.
2 Краткие сведения
Драйверы KIPPRIBOR серии SMD – устройства, выполняющие преобразование управляю- щих команд внешнего устройства (контроллера) в последовательность коммутационных состоя- ний выходных ключей, питающих обмотки шагового двигателя. Драйвер состоит из алюминиевого основания, установленной на основании электронной платы, защитной крышки. На плате смонтированы силовые ключи, индикаторы, разъемы под- ключения внешних цепей и DIP-переключатели.
2.1 Назначение и область применения
Драйверы предназначены для преобразования сигналов контроллера во вращательное движение ротора шагового двигателя. Драйвер выполняет функцию выходного силового каскада, который связывает контроллер с двигателем. Он подает на обмотки шагового двигателя питание в соответствии с алгоритмом работы, который задается контроллером. Таким образом обеспе- чивается управление шаговым двигателем. Драйверы находят применение в решениях автоматизации процессов: металлообрабаты- вающие станки с ЧПУ, гравировальные машины, установки раскроя, упаковочные и фасовочные линии.
Основные особенности драйверов шаговых двигателей KIPPRIBOR:
- Драйверы серии SMD построены с использованием современной элементной базы, в их конструкции применен 32-битный DSP-процессор.
- Предназначены для построения системы шагового привода без обратной связи.
- Имеют оптическую развязку силовых цепей для предотвращения повреждений кон- троллера и двигателя в результате пробоя силового ключа.
- Максимальная частота управляющих импульсов 200 кГц.
- Дискретное ограничение фазного тока, ограничение тока удержания.
- Микрошаговый режим работы (с коэффициентом до 1/256).
- Функция снижения уровня шума и вибраций
2.2 Сведения об изготовителе
Изготовитель: Changzhou Jinsanshi Mechatonics Co., Ltd. Адрес изготовителя: NO.135 Dailuo Road, Luoyang Twon, Wujin District, Changzhou City, Jiangsu Province, 213104, Китай. Драйверы KIPPRIBOR серии SMD изготовлены в соответствии с техническими регламен- тами Таможенного союза: ТР ТС 004/2011 «О безопасности низковольтного оборудования», утверждён Решением Комиссии Таможенного союза от 16 августа 2011 года No 768, ТР ТС 020/2011 «Электромагнитная совместимость технических средств», утвержден Решением Комис- сии Таможенного союза от 9 декабря 2011г. No879. Декларация соответствия ЕАЭС N RU Д- CN.РА01.В.40575/19 от 19.04.2019 до 18.04.2024.
2.3 Данные с заводской таблички
На заводской табличке приведены следующие данные (на примере драйвера SMD-M545D):
- Наименование и модель изделия.
- Логотип компании KIPPRIBOR.
- Таблица выбора максимального тока.
- Положения переключателя SW4 (установка тока удержания).
- Таблица выбора коэффициента деления шага.
- Напряжение питания драйвера.
- Наименование LED-индикаторов.
- Обозначение клемм подключения сигнала «Шаг».
- Обозначение клемм подключения сигнала «Направление».
- Обозначение клемм подключения сигнала «Разрешение».
- Порядковые номера DIP-переключателей.
- Обозначение клемм подключения питания драйвера.
- Обозначение клемм подключения двигателя (фаза А).
- Обозначение клемм подключения двигателя (фаза В).
- Интернет-адрес компании KIPPRIBOR.
- Знак сертификации по регламентам ЕЭС.
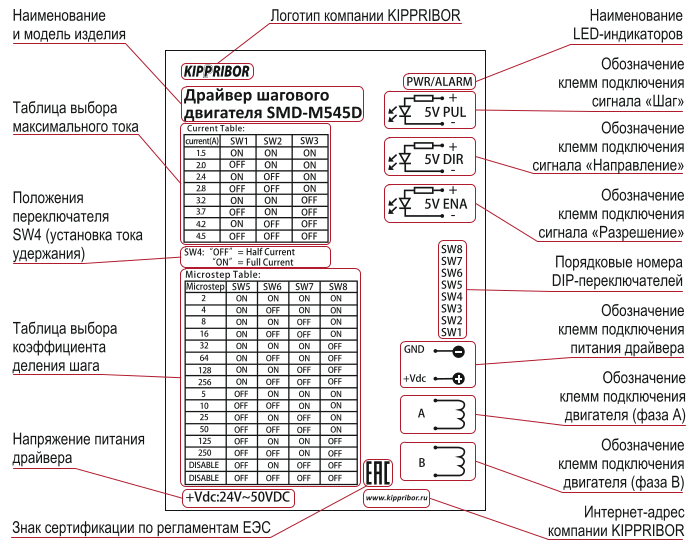
Данные на заводской табличке
2.4 Модельный ряд драйверов KIPPRIBOR
Модельный ряд драйверов KIPPRIBOR представлен модификациями, краткий обзор кото- рых приведен в таблице ниже.
Модельный ряд драйверов KIPPRIBOR
| Описание | Внешний вид | |
| Модификация | SMD-M430D |  |
| Напряжение питания | 24...50 VDC | |
| Количество фаз | 2 | |
| Максимальный ток фазы шагового двигателя |
3 А | |
Модельный ряд драйверов KIPPRIBOR (продолжение)
| Описание | Внешний вид | |
| Модификация | SMD-DM542 |  |
| Напряжение питания | 18...50 VDC | |
| Количество фаз | 2 | |
| Максимальный ток фазы шагового двигателя |
4,2 А | |
| Модификация | SMD-M545D |  |
| Напряжение питания | 24...50 VDC | |
| Количество фаз | 2 | |
| Максимальный ток фазы шагового двигателя |
4,5 А | |
| Модификация | SMD-DM556D |  |
| Напряжение питания | 24...50 VDC | |
| Количество фаз | 2 | |
| Максимальный ток фазы шагового двигателя |
5,6 А | |
| Модификация | SMD-M860D |  |
| Напряжение питания | 24...80 VDC | |
| Количество фаз | 2 | |
| Максимальный ток фазы шагового двигателя |
7,2 А | |
| Модификация | SMD-DM860D | 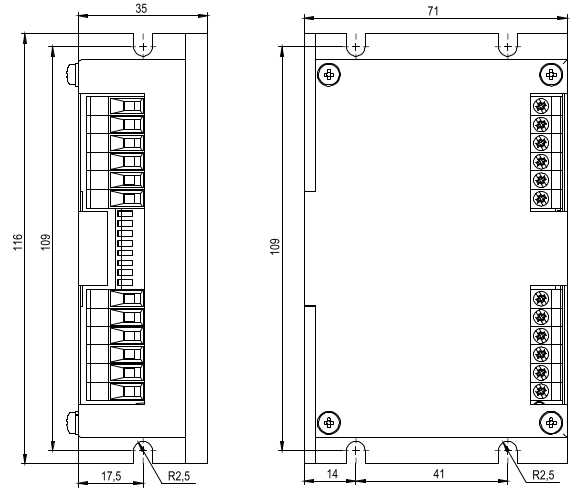 |
| Напряжение питания | 24...80 VDC/ 20...60 VAC |
|
| Количество фаз | 2 | |
| Максимальный ток фазы шагового двигателя |
7,2 А | |
3 Технические характеристики драйверов серии SMD
3.1 Технические характеристики
Технические характеристики драйверов KIPPRIBOR серии SMD сведены в таблицу, пред- ставленную ниже.
модификации и технические характеристики драйверов KIPPRIBOR серии SMD
| Параметр | Значение | |||||
| Модель драйвера | SMD- M430D |
SMD- DM542 |
SMD- M545D |
SMD- DM556D |
SMD- M860D |
SMD- DM860D |
| Тип подключаемых ша- говых двигателей |
2-фазные биполярные, униполярные с 8 выводами | |||||
| Напряжение питания драйвера |
24...50 VDC |
18...50 VDC |
24...50 VDC |
24...50 VDC |
24...80 VDC |
24...80 VDC/ 20...60 VAC |
| Максимальная частота управляющих импуль- сов |
100 кГц | 200 кГц | 200 кГц | 200 кГц | 200 кГц | 200 кГц |
| Максимальный уста- навливаемый ток фазы шагового двигателя (действующее значе- ние) |
2,14 | 3,0 | 3,2 | 4,0 | 6,0 | 6,0 |
| Максимальный уста- навливаемый ток фазы шагового двигателя (амплитудное значе- ние) |
3 А | 4,2 А | 4,5 А | 5,6 А | 7,2 А | 7,2 А |
| Количество установок фазного тока |
8 | 8 | 8 | 8 | 8 | 8 |
| Количество установок микрошагового режима |
7 | 15 | 14 | 16 | 14 | 16 |
| Максимальный коэф- фициент деления шага |
1/64 | 1/128 | 1/256 | 1/256 | 1/256 | 1/256 |
| Оптическая развязка силовых цепей драй- вера |
Да | |||||
| Функция ограничения тока в режиме удержа- ния |
Нет | Да | ||||
| Дополнительные функ- ции |
Понижение шума, понижение вибраций, функция защиты двигателя от пере- грузки |
|||||
Общие технические характеристики драйверов KIPPRIBOR серии SMD
| Параметр | Значение |
| Температура эксплуатации | 0...50°С |
| Влажность воздуха | 40...90% |
| Максимальное вибрационное ускорение | 5,9 м/с² |
| Состав окружающего воздуха | Не допускается содержание в воздухе масляных паров, токопроводящей пыли, химически активных паров. |
3.2 Габаритные размеры
3.2.1 Габаритные размеры драйверов SMD-M430D

Габаритные размеры драйверов SMD-M430D
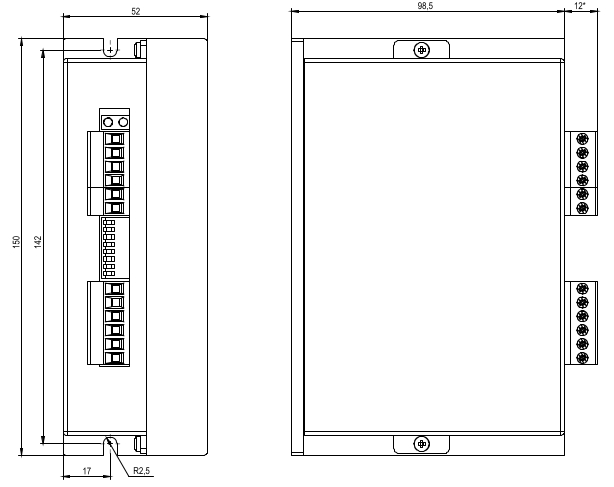
3.2.2 Габаритные размеры драйверов SMD-DM542, SMD-M545D, SMD-DM556D
Габаритные размеры драйверов SMD-DM542, SMD-M545D, SMD-DM556D
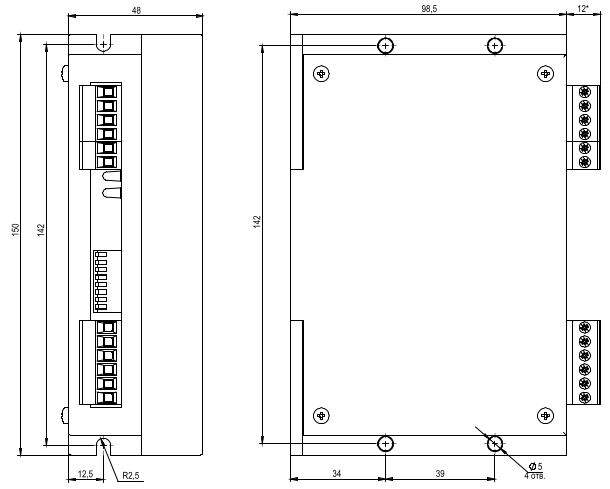
3.2.3 Габаритные размеры драйверов SMD-M860D
Габаритные размеры драйверов SMD-M860D
3.2.4 Габаритные размеры драйверов SMD-DM860D
Габаритные размеры драйверов SMD-DM860D
4 Подключение и управление драйверами серии SMD
4.1 Клеммы, DIP-переключатели, LED-индикаторы.
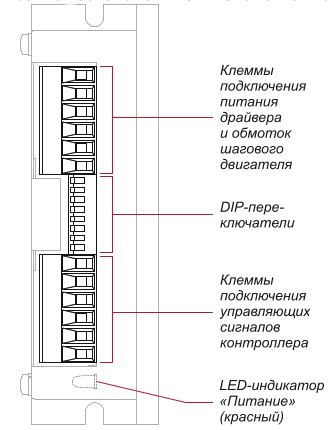
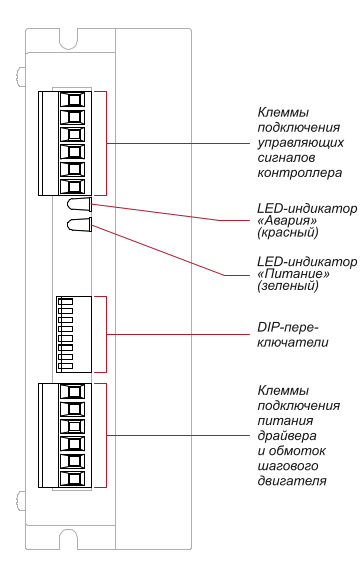
На плате драйвера установлены разъемы для подключения шагового двигателя и управ- ляющих сигналов контроллера; DIP-переключатели для установки коэффициента деления шага, максимального тока фаз двигателя, ограничения тока удержания; также светодиодные индика- торы. Далее приводится описание расположения этих элементов на драйверах. 
Расположение клемм, переключателей и индикаторов на драйверах SMD-M430D
асположение клемм, переключателей и индикаторов на драйверах SMD-M545D, SMD-DM542, SMD-DM556D

Расположение клемм, переключателей и индикаторов на драйверах SMD-M860D
Расположение клемм, переключателей и индикаторов на драйверах SMD-DM860D
4.2 Подключение драйверов
Для подключения управляющих и силовых цепей на драйверах предусмотрены клеммы. Для удобства монтажа и обслуживания они выполнены разъемными (кроме модификации SMD- M430D).
4.2.1 Схема подключения
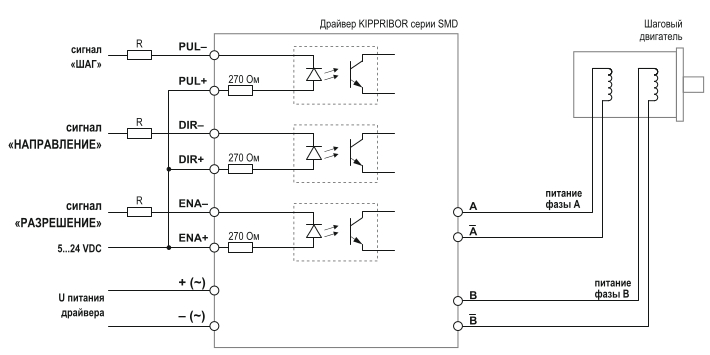
Схемы подключения драйверов приведены на рисунках ниже.
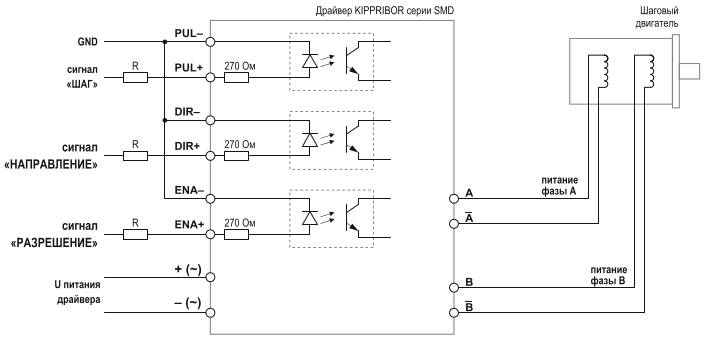
Подключение драйверов (схема с общим анодом)
Подключение драйверов (схема с общим катодом)
Управляющие сигналы «Шаг», «Направление», «Разрешение» должны быть подключены к драйверу через токоограничительные резисторы. Значение сопротивления резисторов зависит от амплитуды управляющего сигнала.
Величина сопротивления токоограничительных резисторов
| Амплитуда управляющего сигнала | Значение сопротивления резисторов |
| 5 В | Без сопротивления |
| 12 В | 680 Ом |
| 24 В | 1,8 кОм |
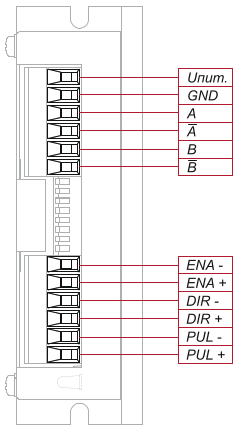
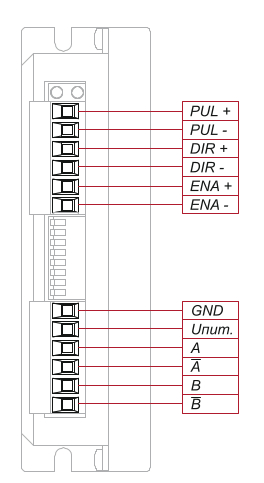
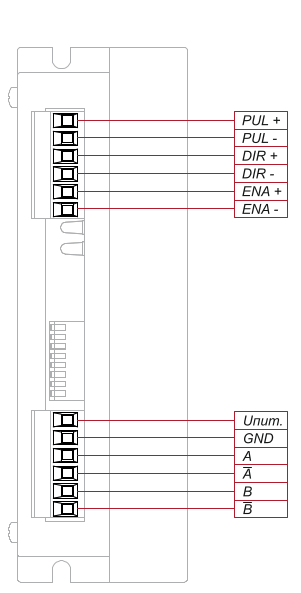
4.2.2 Назначение клемм подключения внешних цепей
Клеммы подключения внешних цепей драйвера SMD-M430D
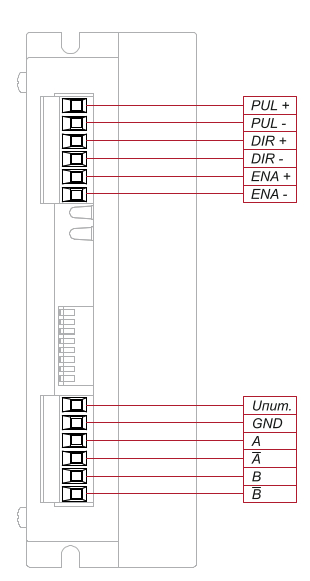
Клеммы подключения внешних цепей драйверов SMD-M545D, SMD-DM542, SMD-DM556D
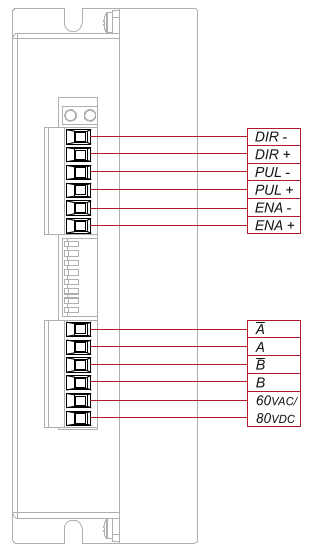
Клеммы подключения внешних цепей драйвера SMD-M860D
Клеммы подключения внешних цепей драйвера SMD-DM860D
Назначение клемм подключения драйверов
| Наименование | Назначение |
| PUL+ | Клеммы подключения управляющего сигнала «Шаг» |
| PUL- | |
| DIR+ | Клеммы подключения управляющего сигнала «Направление» |
| DIR- | |
| ENA+ | Клеммы подключения управляющего сигнала «Разрешение» |
| ENA- | |
| A | Клеммы подключения обмотки фазы А шагового двигателя |
| A | |
| B | Клеммы подключения обмотки фазы В шагового двигателя |
| B | |
| Uпит. | Клемма подключения «+» источника питания драйвера |
| GND | Клемма подключения «-» источника питания драйвера |
| 60VAC/80VDC | Клеммы подключения источника питания драйвера (только для драйвера модели SMD-DM860D) |
4.2.3 Требования к управляющим сигналам
Управляющие сигналы «Шаг», «Направление», «Разрешение» представляют собой прямо- угольные импульсы. Каждый импульс сигнала «Шаг» является командой для поворота ротора на величину од- ного углового шага (или микрошага в микрошаговом режиме). Высокий и низкий уровень сигнала «Направление» задает направление вращения ротора. Например, если при высоком уровне сигнала «Направление» ротор двигателя вращается в направлении по часовой стрелке, то смена уровня сигнала на низкий повлечет реверс ротора, и он будет вращаться против часовой стрелки. Активация сигнала «Разрешение» запрещает работу шагового двигателя.
В случае, если сигнал «Разрешение» активен ток удержания в обмотки шаго- вого двигателя не подается. Ротор фактически находится в свободном со- стоянии.
Для предотвращения ошибок в работе относительное расположение фронтов сигналов во времени, а также длительность импульсов должны соответствовать определенным требова- ниям. 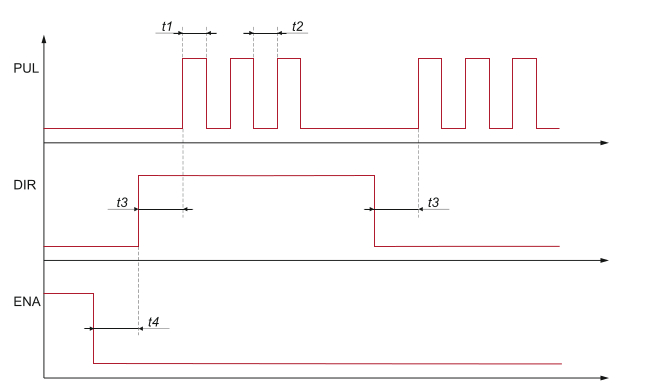
Временная диаграмма сигналов «Шаг», «Направление», «Разрешение»
Значения временных интервалов, показанных на диаграмме должны соответствовать сле- дующим параметрам:
- t1 - длительность логической «1» сигнала «Шаг» не менее 2,5 мкс,
- t2 - длительность логического «0» сигнала «Шаг» не менее 2,5 мкс,
- t3 - время установления сигнала «Направление» не менее 6 мкс,
- t4 - время установления сигнала «Разрешение» не менее 5 мкс.
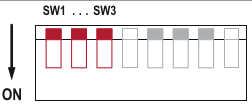
4.3 Установка DIP-переключателей
Настройка режима работы драйвера осуществляется посредством установки DIP-переклю- чателей. На всех моделях драйверов установлен блок из 8 DIP-переключателей. Переключатели разбиты на логические группы. Функциональное назначение групп показано в таблице:
назначение DIP-переключателей
| Функциональное назначе-ние DIP-переключателей | Модель драйвера | |
| SMD-M430D | SMD-DM542, SMD-M545D, SMD-DM556D, SMD-M860D, SMD-DM860D |
|
| Установка коэф- фициента деле- ния шага |
 |
 |
| Установка мак- симального тока обмоток |
 |
 |
| Ограничение тока удержани |
Функция работает в автоматическом режиме. Для ее активации микропереключатели не используются. |
 |
| Не задейство- ванные пере- ключатели |
 |
Нет |
4.3.1 Установка коэффициента деления
Драйверы KIPPRIBOR серии SMD позволяют управлять двигателем в микрошаговом ре- жиме. Для этого в их конструкции предусмотрена возможность устанавливать различные значе- ния коэффициента деления шага. Практическое значение микрошагового режима заключается в повышении точности позиционирования ротора шагового двигателя и существенном снижении уровня вибраций и шума. Отдельно следует сказать, что в микрошаговом режиме двигатель зна- чительно «легче» проходит зону резонанса. В таблицах микрошагового режима представлено количество шагов на один оборот ротора шагового двигателя при различных положениях DIP-переключателей.
В таблицах микрошагового режима приведены данные драйверов серии SMD справедливые для шаговых двигателей с угловым шагом 1,8° (200 шагов/обо- рот).
Установка микрошагового режима для драйверов SMD-M430D
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | ||
| SW1 | SW2 | SW3 | |
| 200 (полношаговый режим) | off | off | off |
| 400 | on | off | off |
| 800 | off | on | off |
| 1600 | on | on | off |
| 3200 | off | off | on |
| 6400 | on | off | on |
| 12800 | off | on | on |
| Незадействованная комбинация | on | on | on |
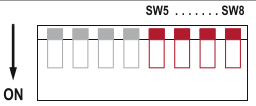
Таблица установки микрошагового режима для драйверов SMD-DM542
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| Незадействованная комбинация | on | on | on | on |
| 400 | off | on | on | on |
| 800 | on | off | on | on |
| 1600 | off | off | on | on |
| 3200 | on | on | off | on |
| 6400 | off | on | off | on |
| 12800 | on | off | off | on |
| 25600 | off | off | off | on |
| 1000 | on | on | on | off |
| 2000 | off | on | on | off |
| 4000 | on | off | on | off |
| 5000 | off | off | on | off |
| 8000 | on | on | off | off |
| 10000 | off | on | off | off |
| 20000 | on | off | off | off |
| 25000 | off | off | off | off |
Установка микрошагового режима для драйверов SMD-M545D
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| 400 | on | on | on | on |
| 800 | on | off | on | on |
| 1600 | on | on | off | on |
| 3200 | on | off | off | on |
| 6400 | on | on | on | off |
| 12800 | on | off | on | off |
| 25600 | on | on | off | off |
| 51200 | on | off | off | off |
| 1000 | off | on | on | on |
| 2000 | off | off | on | on |
| 5000 | off | on | off | on |
| 10000 | off | off | off | on |
| 25000 | off | on | on | off |
| 50000 | off | off | on | off |
| Незадействованная комбинация | off | on | off | off |
| Незадействованная комбинация | off | off | off | off |
Установка микрошагового режима для драйверов SMD-DM556D
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| 400 | on | on | on | on |
| 800 | off | on | on | on |
| 1600 | on | off | on | on |
| 3200 | off | off | on | on |
| 6400 | on | on | off | on |
| 12800 | off | on | off | on |
| 25600 | on | off | off | on |
| 51200 | off | off | off | on |
| 1000 | on | on | on | off |
| 2000 | off | on | on | off |
| 5000 | off | off | on | on |
| 10000 | on | on | off | off |
| 20000 | on | off | off | off |
| 40000 | off | off | off | off |
Установка микрошагового режима для драйверов SMD-M860D
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| 400 | on | on | on | on |
| 800 | on | off | on | on |
| 1600 | on | on | off | on |
| 3200 | on | off | off | on |
| 6400 | on | on | on | off |
| 12800 | on | off | on | off |
| 25600 | on | on | off | off |
| 51200 | on | off | off | off |
| 1000 | off | on | on | on |
| 2000 | off | off | on | on |
| 5000 | off | on | off | on |
| 10000 | off | off | off | on |
| 25000 | off | on | on | off |
| 50000 | off | off | on | off |
| Незадействованная комбинация | off | on | off | off |
| Незадействованная комбинация | off | off | off | off |
Установка микрошагового режима для драйверов SMD-DM860D
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| 400 | on | on | on | on |
| 800 | off | on | on | on |
| 1600 | on | off | on | on |
| 3200 | off | off | on | on |
| 6400 | on | on | off | on |
| 12800 | off | on | off | on |
| 25600 | on | off | off | on |
| 51200 | off | off | off | on |
| 1000 | on | on | on | off |
| 2000 | off | off | on | off |
| 4000 | on | off | on | off |
Установка микрошагового режима для драйверов SMD-DM860D (продолжение)
| Микрошаговый режим (шагов на оборот) |
Положение DIP-переключателей | |||
| SW5 | SW6 | SW7 | SW8 | |
| 8000 | on | on | off | off |
| 10000 | off | on | off | off |
| 20000 | on | off | off | off |
| 40000 | off | off | off | off |
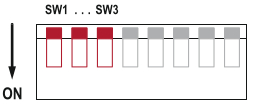
4.3.2 Установка максимального тока обмоток
Одним из основных критериев подбора драйвера к шаговому двигателю является возмож- ность драйвера обеспечивать ток, соответствующий номинальному току обмоток двигателя. Драйверы серии SMD имеют по восемь установок тока. Каждая комбинация переключателей со- ответствует определенному значению максимального тока, подаваемого в обмотку двигателя. В идеальном случае значение установленного на драйвере максимального тока должно совпадать с паспортным током обмоток двигателя. В процессе наладки шагового привода может возникнуть необходимость несколько повысить ток для поддержания момента либо понизить для обеспече- ния благоприятного теплового режима. Поэтому желательно подбирать драйвер так, чтобы но- минальный ток двигателя попадал в середину диапазона возможных установок.
Установка максимального тока на драйверах SMD-M430D
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 0,9 | 0,65 | on | on | on |
| 1,2 | 0,86 | on | on | off |
| 1,5 | 1,10 | on | off | on |
| 1,8 | 1,28 | off | on | on |
| 2,1 | 1,50 | off | on | off |
| 2,4 | 1,72 | off | off | on |
| 2,7 | 1,93 | off | off | off |
| 3,0 | 2,14 | off | off | off |
Установка максимального тока на драйверах SMD-DM542
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 1,0 | 0,71 | on | on | on |
| 1,4 | 1,04 | off | on | on |
| 1,9 | 1,36 | on | off | on |
| 2,4 | 1,69 | off | off | on |
| 2,8 | 2,03 | on | on | off |
| 3,3 | 2,36 | off | on | off |
| 3,8 | 2,69 | on | off | off |
| 4,2 | 3,00 | off | off | off |
Установка максимального тока на драйверах SMD-M545D
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 1,5 | 1,07 | on | on | on |
| 2,0 | 1,43 | off | on | on |
| 2,4 | 1,72 | on | off | on |
| 2,8 | 2,00 | off | off | on |
| 3,2 | 2,28 | on | on | off |
| 3,7 | 2,64 | off | on | off |
| 4,2 | 3,00 | on | off | off |
| 4,5 | 3,21 | off | off | off |
Установка максимального тока на драйверах SMD-DM556D
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 2,1 | 1,5 | on | off | off |
| 2,7 | 1,9 | off | on | off |
| 3,2 | 2,3 | on | on | off |
| 3,8 | 2,7 | off | off | on |
| 4,3 | 3,1 | on | off | on |
| 4,9 | 3,5 | off | on | on |
| 5,6 | 4,0 | on | on | on |
Установка максимального тока на драйверах SMD-M860D
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 2,4 | 2,00 | on | on | on |
| 3,1 | 2,57 | off | on | on |
| 3,8 | 3,14 | on | off | on |
| 4,5 | 3,71 | off | off | on |
| 5,1 | 4,28 | on | on | off |
| 5,8 | 4,86 | off | on | off |
| 6,5 | 5,43 | on | off | off |
| 7,2 | 6,00 | off | off | off |
Установка максимального тока на драйверах SMD-DM860D
| Ток обмоток шагового двигателя, А | Положение DIP-переключателей | |||
| Максимальное значение | Действующее значение | SW1 | SW2 | SW3 |
| 2,4 | 2,00 | on | on | on |
| 3,1 | 2,57 | off | on | on |
| 3,8 | 3,14 | on | off | on |
| 4,5 | 3,71 | off | off | on |
| 5,1 | 4,28 | on | on | off |
| 5,8 | 4,86 | off | on | off |
| 6,5 | 5,43 | on | off | off |
| 7,2 | 6,00 | off | off | off |
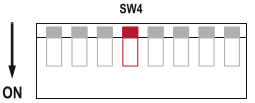
4.3.3 Режим ограничения тока удержания
В процессе работы шагового привода возможны состояния, когда шаговый двигатель нахо- дится в режиме «Останов» и требуется сохранять положение ротора. В таких случаях в обмотки двигателя драйвер подает ток удержания во избежание самопроизвольного движения ротора. Поскольку в таких ситуациях для удержания ротора достаточно подавать в обмотки двигателя ток, гораздо меньше максимального, а также для исключения перегрева шагового двигателя в драйверах серии SMD предусмотрена функция ограничения тока обмоток в режиме удержания. В модели SMD-M430D эта функция работает в автоматическом режиме. В остальных мо- дификациях настройка функции производится установкой DIP-переключателя SW4:
Настройка функции ограничения тока удержания
| Ограничение тока удержания | Положение DIP-переключателя SW4 |
| Отключено | on |
| Включено | off |
При отключенной функции ограничения ток, подаваемый драйвером в обмотки шагового двигателя во время остановки равен максимальному установленному току.
Если функция ограничения активирована, то через 0,5 секунды после прекращения подачи импульсов «Шаг» на вход драйвера PUL величина тока обмоток будет ограничена до значения 50% от максимального.
4.4 LED-индикаторы
В качестве элементов индикации состояния на драйверах серии SMD установлены LED- индикаторы. Их активное состояние информирует пользователя о следующих событиях:
состояния LED-индикаторов
| Цвет свечения активного LED индикатора | Модель драйвера | |
| SMD-M430D | SMD-DM542, SMD-M545D, SMD-DM556D,SMD-M860D, SMD-DM860D | |
| Зеленый | Не установлен на данной модели. | На драйвер подано напряжение питания. |
| Красный | На драйвер подано напряжение питания. | Авария! Напряжение питания не соответствует па- раметрам драйвера или перегрузка по току. |
Чтобы сбросить сигнал аварии (для моделей SMD-DM542, SMD-M545D, SMD-DM556D, SMD-M860D, SMD-DM860D) нужно:
- Отключить питание драйвера.
- Устранить причины неисправности.
- Подать питание на драйвер.
Для сброса сигнала аварии рекомендуемое время нахождения драйвера в обес- точенном состоянии должно быть не менее 3 минут.
4.5 Рекомендации по совместимости драйверов и двигателей KIP- PRIBOR
При подборе драйвера к шаговому двигателю следует согласовывать такие параметры:
- Максимальный ток. Драйвер должен иметь возможность запитать обмотки двигателя током, соответствующим номинальному току фазных обмоток двигателя.
- Напряжение питания. Диапазон напряжения питания драйверов KIPPRIBOR включает 24VDC. При необходимости приподнять напряжение питания при высокой частоте управляющих импульсов драйверы дают возможность использовать источник питания с максимальным напряжением до 80VDC (в зависимости от модификации). Для реше- ний, где актуально питание от источника питания переменного тока предназначена мо- дификация SMD-DM860D с универсальным питанием 24...80VDC/20...60VAC.
- Наличие настроек микрошагового режима. Предусмотрено на всех модификациях драйверов KIPPRIBOR. Доступны коэффициенты деления шага до 1:256.
- Формат управляющих сигналов. Драйверы KIPPRIBOR управляются сигналами, соот- ветствующими протоколу STEP/DIR.
- Функция ограничения тока. Служит для ограничения тока обмоток двигателя в режиме останов. Функция доступна на всех модификациях драйверов: на SMD-M430D активи- руется автоматически, на остальных – установкой DIP-переключателя.
На драйверах SMD-M430D красный LED-индикатор установлен внутри корпуса. Однако, визуализация его со- стояния возможна через конструктивные вырезы крышки.
Таким образом, в плане функциональности и по типу управляющих сигналов драйверы KIPPRIBOR аналогичны. В качестве первостепенного критерия подбора выступает максималь- ный ток. Ниже представлена таблица соответствия «драйвер-шаговый двигатель». Так как драй- веры имеют несколько дискретных установок максимального тока, они поставлены в соответ- ствие двигателям, у которых ток обмоток попадает ближе к середине диапазона установок драй- вера.
Драйверы KIPPRIBOR и подключаемые к ним двигатели KIPPRIBOR
| Модель драйвера KIPPRIBOR | Модель шагового двигателя KIPPRIBOR |
| SMD-M430D | SMO-17.H218S.2K80.170.4K.034 |
| SMO-17.H218S.5K20.120.4K.040 | |
| SMO-17.H218S.4K00.168.4K.040 | |
| SMO-17.H218S.4K00.170.4K.040 | |
| SMO-17.H218S.5K00.100.4K.048 | |
| SMO-17.H218S.5K50.130.4K.048 | |
| SMO-17.H218S.5K50.150.4K.048 | |
| SMO-17.H218S.5K20.168.4K.048 | |
| SMO-17.H218S.7K00.150.4K.060 | |
| SMO-23.H218S.3K20.200.4K.041 | |
| SMO-23.H218S.5K50.100.4K.041 | |
| SMO-23.H218S.5K00.200.4K.041 | |
| SMO-23.H218S.8K20.150.4K.051 | |
| SMO-23.H218S.9K00.200.4K.051 | |
| SMO-23.H218S.13K5.150.4K.056 | |
| SMD-DM542 | SMO-23.H218S.12K6.280.4K.056 |
| SMO-23.H218S.19K0.280.4K.076 | |
| SMD-M545D | SMO-23.H218S.12K0.300.4K.056 |
| SMO-23.H218S.20K0.300.4K.076 | |
| SMO-23.H218S.22K0.300.4K.082 | |
| SMO-23.H218S.25K0.300.4K.100 | |
| SMO-23.H218S.30K0.300.4K.112 | |
| SMD-DM556D | SMO-23.H218S.20K0.400.4K.076 |
| SMO-23.H218S.20K0.400.4K.082 | |
| SMO-23.H218S.25K0.400.4K.100 | |
| SMO-23.H218S.28K0.350.4K.112 | |
| SMO-23.H218S.30K0.400.4K.112 | |
| SMO-34.H218S.35K0.400.4K.078 | |
| SMO-34.H218S.45K0.420.4K.078 |
драйверы KIPPRIBOR и подключаемые к ним двигатели KIPPRIBOR (продолжение)
| Модель драйвера KIPPRIBOR | Модель шагового двигателя KIPPRIBOR |
| SMD-M860D / SMD-DM860D | SMO-34.H218S.45K0.600.8K.078 |
| SMO-34.H218S.45K0.450.4K.082 | |
| SMO-34.H218S.50K0.560.8K.082 | |
| SMO-34.H218S.68K0.500.4K.100 | |
| SMO-34.H218S.65K0.500.8K.100 | |
| SMO-34.H218S.60K0.500.4K.118 | |
| SMO-34.H218S.85K0.600.4K.118 | |
| SMO-34.H218S.85K0.500.8K.118 | |
| SMO-34.H218S.85K0.560.8K.118 | |
| SMO-34.H218S.100K.500.4K.156 | |
| SMO-34.H218S.122K.620.4K.156 | |
| SMO-34.H218S.120K.490.8K.156 | |
| SMO-34.H218S.120K.560.8K.156 |
5 Монтаж и эксплуатация драйверов KIPPRIBOR серии SMD
5.1 Требования к персоналу
К монтажу драйверов KIPPRIBOR допускаются только квалифицированные специалисты, имеющие допуск к производству электромонтажных работ и ознакомленные с настоящим Руко- водством.
При выполнении работ соблюдайте требования главы Меры безопасности! Выполняйте работы по установке, ремонту и обслуживанию драйверов только при снятии напряжения с оборудования, выполнив организационные и технические мероприятия, препятствующие случайной подаче напряжения.
5.2 Установка драйверов
Установка драйверов KIPPRIBOR серии SMD выполняется на поверхность с учетом габа- ритных и установочных размеров, приведенных в главе «Технические характеристики». В месте установке драйвера должны быть соблюдены условия:
- Отсутствие в воздухе пыли.
- Отсутствие в воздухе агрессивных паров.
- Отсутствие в воздухе масляной взвеси.
- Относительная влажность воздуха в пределах 40...90%.
- Температура окружающей среды в диапазоне 0...50°С.
- Достаточная по эффективности естественная либо принудительная вентиляция.
Драйвер должен быть установлен в вертикальном положении. Крепление следует произ- водить через пазы, выполненные в боковой части основания. Рекомендуется устанавливать драйверы внутри шкафа управления. Пример правильной установки драйвера с использованием минимального набора метизов приведен ниже:
Пример установки драйвера
Расстояния от драйвера до стенок шкафа и до оборудования, установленного внутри шкафа должно быть не менее 100мм.
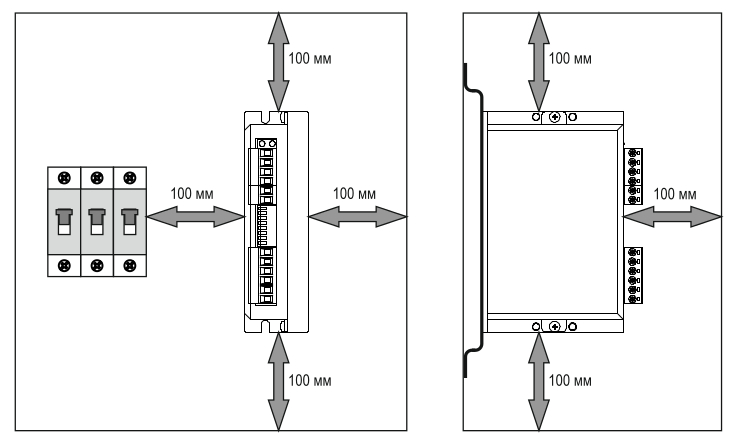
Минимальные расстояния от корпуса драйвера
Алюминиевое основание драйвера выполняет функцию радиатора, на котором установ- лены силовые ключи питания обмоток двигателя. На внешней стороне основания выполнено оребрение для повышения эффективности отвода тепла, выделяемого ключами. Направление ребер определяет правильное положение драйвера при установке. При правильной установке драйвера циркулирующий воздух проходит снизу-вверх вдоль ребер. Это обеспечивает эффек- тивную отдачу тепла от основания в окружающую среду. Кроме того, при вертикальном монтаже вентиляционные отверстия в корпусе драйвера расположены снизу и сверху, обеспечивая отвод тепла из внутреннего объема корпуса драйвера. Ниже показаны типовые варианты неправиль- ной установки.

Неверный монтаж драйвера: ребра прижаты к поверхности
Не допускается установка драйвера ребрами к поверхности и в положении, когда ребра основания расположены горизонтально. В таких случаях эффек- тивность отвода тепла от силовых ключей драйвера значительно снижа- ется, что может привести к перегреву устройства, нарушению его коррект- ной работы вплоть до выхода из строя.
Неверный монтаж драйвера: ребра расположены горизонтально под корпусом
5.3 Электрическое подключение
К монтажу драйверов допускаются только квалифицированные специалисты, имеющие допуск к производству электромонтажных работ и ознакомленные с настоящим Руководством.
Электрическое подключение драйверов следует производить с помощью штатных клемм в соответствии со схемами, приведенными в Главе 4. На проводники рекомендуется устанавли- вать наконечники-гильзы. Во избежание повреждений в процессе эксплуатации силовые и сиг- нальные провода следует закрепить либо уложить в канал, закрывающийся крышкой. Рекомен- дуется разделять в пространстве сигнальные и силовые проводники. Провода питания фаз дви- гателя рекомендуется пофазно объединить в витые пары и заключить в экранирующую оплетку. Оплетку соединить с заземлением станка. При подключении нескольких драйверов к одному источнику питания питающие провод- ники должны быть смонтированы по топологии «звезда», соединение проводников выполняется только на клеммах источника питания.
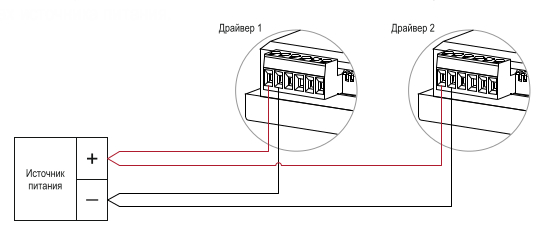
Правильное подключение двух драйверов к одному источнику питания
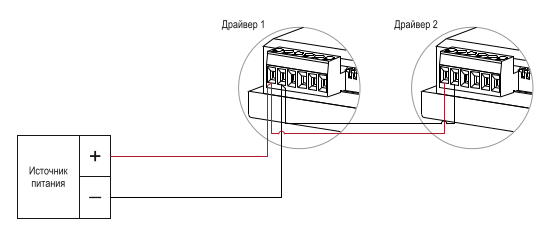
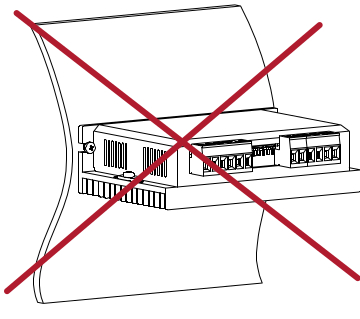
Неверное подключение двух драйверов к одному источнику питания
Не рекомендуется последовательное соединение линий питания драйверов. При таком со- единении возможно возникновение взаимных помех между устройствами и их не корректная ра- бота.
6 Гарантийное и плановое техническое обслуживание
6.1 Плановое техническое обслуживание
В процессе эксплуатации драйвера необходимо не реже 1 раза в 6 месяцев проводить мероприятия по его обслуживанию:
- Проверка надежности крепления драйвера на монтажной поверхности.
- Проверка надежности электрических подключений.
- Проверка крепления кабельного вывода.
- Очистка поверхности драйвера от грязи.
- Очистка ребер основания.
Обнаруженные недостатки следует немедленно устранить. При выполнении работ по техническому обслуживанию следует соблюдать мероприятия, изложенные в главе «Меры безопасности».
6.2 Условия хранения
Драйверы следует хранить в крытых помещениях, в упаковке предприятия изготовителя, в условиях, исключающих контакт с влагой и при отсутствии в атмосфере токопроводящей пыли и паров химически активных веществ, вызывающих коррозию металлических частей и поврежде- ние изоляции. Срок хранения 3 года со дня изготовления. Условия хранения I по ГОСТ15150. Срок службы 5 лет.
6.3 Гарантии изготовителя
Предприятие-изготовитель гарантирует работоспособность драйвера при соблюдении всех мер безопасности, правил монтажа, эксплуатации, при проведении планового технического обслуживания, а также при работе драйвера при номинальных рабочих параметрах, указанных в паспорте и руководстве по эксплуатации. Гарантийный срок службы составляет 12 месяцев с даты продажи при условии соблюде- ния потребителем мер безопасности, правил эксплуатации, транспортировки, хранения, монтажа и при проведении своевременного регулярного планового технического обслуживания. В случае выхода драйвера из строя в течение гарантийного срока, при соблюдении потре- бителем правил эксплуатации, транспортировки, хранения и монтажа, а также при наличии за- полненной ремонтной карты, предприятие-изготовитель обязуется осуществить его бесплатный ремонт или замену на новый.
6.4 Гарантийное обслуживание Условия проведения гарантийного обслуживания:
- Гарантийное обслуживание осуществляется в условиях сервисного центра.
- Фактическое наличие неисправного товара в момент обращения в сервисный центр.
- Гарантийное обслуживание осуществляется в течение всего гарантийного срока, уста- новленного на товар.
- При проведении ремонта срок гарантии продлевается на период нахождения товара в ремонте.
Право на гарантийное обслуживание недействительно в случаях, когда:
- Неисправность устройства вызвана нарушением правил его эксплуатации, транспор- тировки и хранения, изложенных в руководстве.
- На устройстве отсутствует или нарушена (не читаема) заводская этикетка с серийным номером.
- Ремонт, техническое обслуживание или модернизация устройства производились ли- цами, не уполномоченными на то компанией-производителем.
- Дефекты устройства вызваны эксплуатацией устройства в составе комплекта неис- правного оборудования.
- Неисправность устройства вызвана прямым или косвенным действием механических сил, химического, термического воздействия, излучения, агрессивных или нейтраль- ных жидкостей, газов или иных токсичных, или биологических сред, а также любых иных подобных факторов искусственного или естественного происхождения.
6.4 Комплект поставки
Комплект поставки драйверов серии SMD
| Наименование | Количество |
| Драйвер шагового двигателя серии SMD | 1 штука |
| Паспорт и гарантийный талон 2 | 1 штука |